Geometric calibration of a camera or a stereoscopic vision sensor
Transformation between the camera reference frame and the sensor reference frame (retinal plane)
The second transformation, referred as
![]() on Figure 2 binds the camera reference frame
on Figure 2 binds the camera reference frame
 to the sensor reference frame
to the sensor reference frame
 (retinal plane). This is a perspective projection (3×4 matrix, referred as
(retinal plane). This is a perspective projection (3×4 matrix, referred as
 ) that transforms a 3D point
) that transforms a 3D point
 into an image point
into an image point
 (in metric units).
(in metric units).
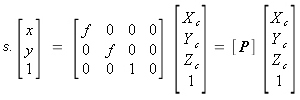
(2)
[zoom...]
![[zoom...]](javascript:window.open(%22../res/Eq_C_ext_05_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
where
 refers to the focal length of the lens used.
refers to the focal length of the lens used.
Equation (2) that shows the perspective projection is to be written:
These equations are non-linear ones.
The use of homogenous coordinates makes it possible to write the perspective projection (and the complete pinhole camera model) under a linear form (see equation (2)).