Calibrage
Lorsqu'on calibre une seule caméra, on s'intéresse aux paramètres intrinsèques définis par la matrice
 et accessoirement aux paramètres extrinsèques définis par la transformation rigide
et accessoirement aux paramètres extrinsèques définis par la transformation rigide
 (localisation de la caméra par rapport au repère du monde). Lorsqu'on calibre un dispositif de vision stéréoscopique, nous nous intéressons aux deux ensembles de paramètres intrinsèques définis par les matrices
(localisation de la caméra par rapport au repère du monde). Lorsqu'on calibre un dispositif de vision stéréoscopique, nous nous intéressons aux deux ensembles de paramètres intrinsèques définis par les matrices
 et
et
 et à la position et l'orientation relative des deux caméras définies par la transformation rigide
et à la position et l'orientation relative des deux caméras définies par la transformation rigide
 .
.
Le calibrage de ce dispositif a pour but de pouvoir reconstruire la position tridimensionnelle de points observés par les deux caméras et est donc très important pour ceux qui souhaitent obtenir des mesures tridimensionnelles précises.
De manière pratique, la procédure de calibrage d'un dispositif de stéréovision est identique à la procédure de calibrage d'une caméra décrite dans la section "Calibrage d'une caméra". Une mire est déplacée dans le champ de vue commun au deux caméras et une série d'images de cette mire vue sous différentes orientations est prise par chacune des caméras.
À titre d'exemple, la figure 13 montre une série de 9 paires d'images d'une mire ayant servi au calibrage d'un dispositif de stéréovision.

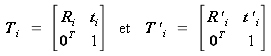
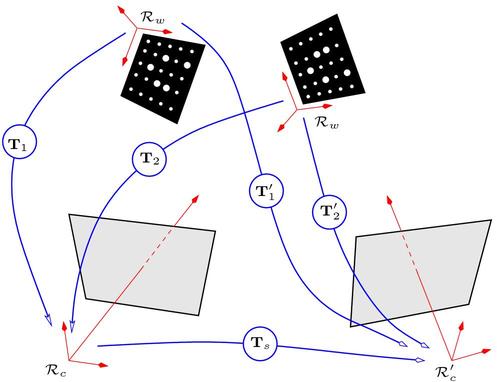
Nous noterons, respectivement pour la caméra gauche et la caméra droite, les transformations rigides
 et
et
 de la façon suivante :
de la façon suivante :
![[zoom...]](javascript:window.open(%22../res/figure_13_2.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
![[zoom...]](javascript:window.open(%22../res/Eq_C_ext_32_1.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
Elles relient la
 vue de la mire respectivement au référentiel de la caméra gauche et à celui de la caméra droite. Pour chaque position de mire, nous avons d'après (23) la relation (cf. figure 14) :
vue de la mire respectivement au référentiel de la caméra gauche et à celui de la caméra droite. Pour chaque position de mire, nous avons d'après (23) la relation (cf. figure 14) :
![[zoom...]](javascript:window.open(%22../res/figure_14_2.jpg%22,%22_blank%22,%22width=%22+Math.min(800,screen.availWidth)+%22,height=%22+Math.min(600,screen.availWidth)+%22,left=%22+(screen.availWidth-800)/2+%22,top=%22+(screen.availHeight-600)/2+%22,scrollbars=yes,resizable=yes%22)?void(0):void(0)){kind=link}
Différentes méthodes permettent d'estimer la transformation
 .
.
La méthode classiquement utilisée consiste à calibrer chaque caméra indépendamment, en utilisant la méthode décrite en section "Calibrage d'une caméra", pour déterminer les paramètres intrinsèques et les coefficients de distorsion des deux caméras, et les deux ensembles
 de matrices des paramètres extrinsèques.
de matrices des paramètres extrinsèques.
 peuvent alors être calculés en utilisant n'importe quelle paire
peuvent alors être calculés en utilisant n'importe quelle paire
 de matrices des paramètres extrinsèques en utilisant l'équation (23) :
de matrices des paramètres extrinsèques en utilisant l'équation (23) :
Le choix de la paire de matrices des paramètres extrinsèques
 est délicat et plusieurs heuristiques sont possibles, comme par exemple :
est délicat et plusieurs heuristiques sont possibles, comme par exemple :
-
choisir arbitrairement toujours la
 paire de matrices de l'expérimentation, par exemple la première paire
paire de matrices de l'expérimentation, par exemple la première paire
 ;
; -
prendre la paire de matrices qui correspond à la plus faible erreur globale de reprojection des points de la mire dans les deux images.
Ces heuristiques ont toutes l'inconvénient de ne pas utiliser la redondance fournie par l'utilisation simultanée de toutes les paires de matrices des paramètres extrinsèques pour estimer la transformation
 .
.
Dorian Garcia [10] a proposé une méthode permettant d'estimer
 en utilisant toutes les matrices des extrinsèques
en utilisant toutes les matrices des extrinsèques
 , et a montré que cela permettait d'obtenir une meilleure précision de calibrage.
, et a montré que cela permettait d'obtenir une meilleure précision de calibrage.
Sa méthode consiste à calculer directement
en minimisant une fonctionnelle de la forme :
avec :
Ce problème d'optimisation non linéaire est résolu en utilisant l'algorithme de Levenberg-Marquardt.